先进医疗装备、智能临床诊疗、人机交互融合等领域对高性能、高安全性的植入式软体生物电子器件的需求日益增长,刺激响应型软体驱动器是实现植入式电子器件智能可控与无损生物信号传输的重要技术路径。然而,现有驱动器存在驱动性能低、生物相容性弱、可降解性弱、传输信号弱等问题,制约了植入式软体生物电子器件的发展与应用。
近日,韩国av
、全省柔性功能材料智能制造装备重点实验室王帆,澳大利亚伍伦贡大学Zhen Jiang,西湖大学陶亮、姚远合作,以韩国av
为第一署名单位在国际顶级期刊 《Science Advances》发表论文。沈文浩是论文第一作者(韩国av
2023届机器人工程专业本科毕业生),徐杰为共同第一作者(韩国av
2024届机器人工程专业本科毕业生)。王帆副教授、李秦川教授、澳大利亚伍伦贡大学Zhen Jiang教授、西湖大学陶亮教授、姚远研究员为共同通讯作者。
面向人民生命健康,破解植入式器件难题
随着“健康中国”战略深入推进,生物医学植入设备对更安全、更智能的材料提出了迫切需求。理想的软体驱动器需同时满足:温和刺激响应、高驱动性能、使用后可生物降解。然而,现有材料一直难以“三全其美”——合成聚合物虽性能优越却无法降解,天然聚合物性能又普遍不足(弯曲应变<0.3%、响应>3秒)(图2B)。
创新设计:让“软”材料迸发“硬”实力
王帆副教授基于前期纤维素电化学驱动器的研究积累,与澳大利亚伍伦贡大学软体驱动器专家Geoffrey M. Spinks教授、Zhen Jiang教授合作,提出了一种全新的分子设计策略:在结晶性MFC中引入无定形PEGDA互穿网络,同步抑制结晶与离子液体聚集(图1A)。
结晶度从58.61%降至45.38%
等效串联电阻降低64%,离子电导率达5.6×10⁻³ S/cm
弯曲应变达0.88%,响应时间<1秒
能量密度6.44 kJ/m³、功率密度3.83 kW/m³
循环3500次保持99%位移,生热<0.4℃,可提起15倍自重
综合性能全面超越已报道的低电压离子电活性聚合物(图1C),为高端医疗装备自主创新提供了关键材料支撑。
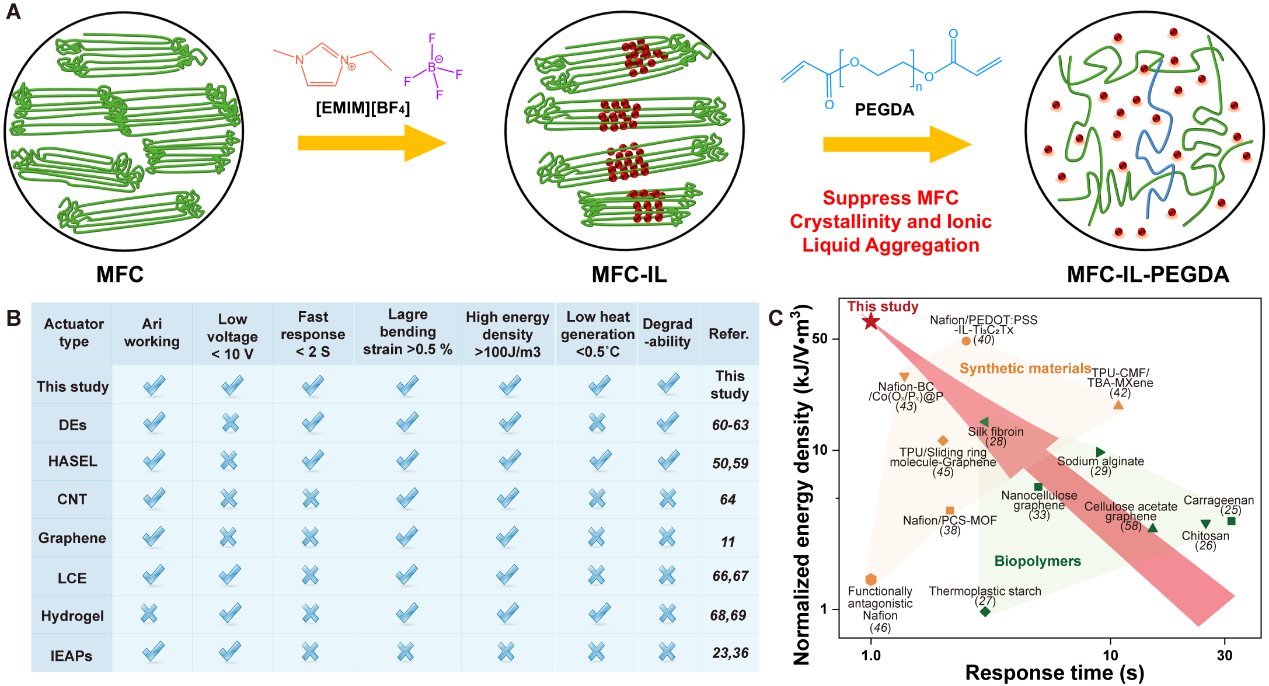
图1. 软致动器的设计与独特性能。(A) 将柔软、无定形的PEGDA网络引入结晶性MFC基质并抑制离子液体(IL)聚集的软致动器设计示意图。(B) 各类软致动器的驱动性能指标对比,突出所设计致动器的独特性能。(C) 在1 V电压下,MFC-IL-PEGDA致动器与已报道IEAPs的能量密度和响应时间对比。
可降解+神经接口:迈向临床转化新阶段
团队进一步与西湖大学浙江省3D微纳加工和表征研究重点实验室姚远研究员和感染与免疫多组学重点实验室罗建华博士、陶亮教授合作,验证了该驱动器的卓越生物降解性——在酶溶液中24小时降解率达92.7%,模拟胃液中超70%,而传统Nafion等材料不足10%。
基于该材料构建的“可致动神经袖带”(图2A-D),在1.0 V低电压下即可快速、紧密包裹神经,信噪比显著提升、界面阻抗大幅降低(图2E-J)。在大鼠坐骨神经实验中,成功记录到清晰的诱发神经信号(幅值~150 μV,频率扩展至~50 Hz),且无组织损伤,响应速度远超传统热驱动袖带(图2K-O)。
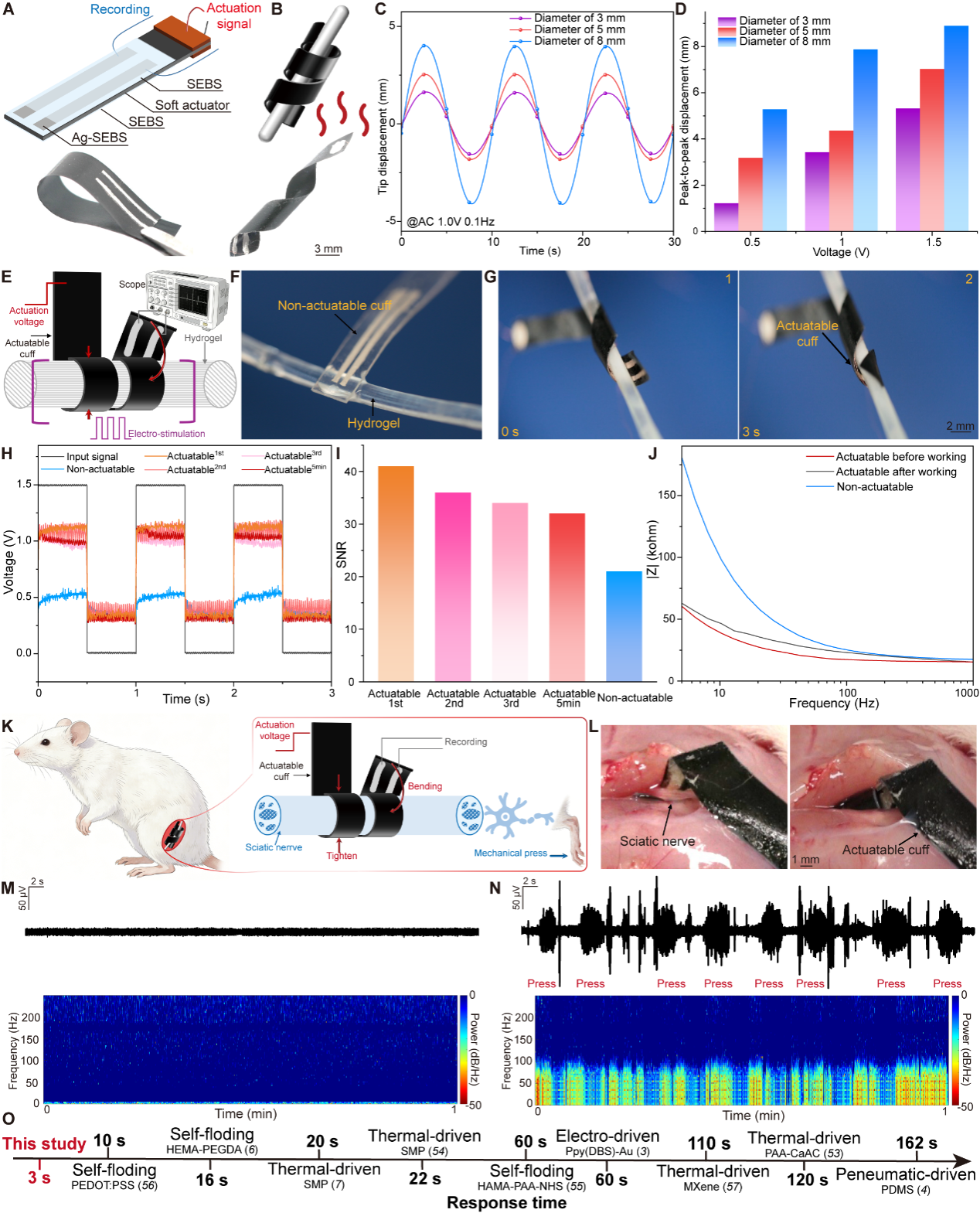
图2. 基于MFC-IL-PEGDA的可致动神经袖带用于体内外神经接口。(A) 器件示意图。(B) 热定型后的螺旋袖带。(C) 不同直径袖带在1.0 V、0.1 Hz下的径向位移随时间变化。(D) 不同直径袖带的峰值位移随电压变化。(E) 体外水凝胶纤维实验装置。(F) 非致动袖带接触不良。(G) 致动袖带在1.0 V下约10秒内紧密缠绕水凝胶纤维。(H-J) 致动袖带相比非致动袖带具有更优的信号记录与传输能力(示波器信号、信噪比、界面阻抗)。(K) 大鼠足部机械刺激下坐骨神经电信号记录示意图。(L) 1.0 V下致动袖带缠绕大鼠坐骨神经。(M-N) 静息期与刺激后记录的生物电信号及对应时频图。(O) 不同材料/机制致动袖带的响应时间对比,本器件响应超快。
论文链接://www.science.org/doi/10.1126/sciadv.aec5692
相关作者简介
第一作者简介:沈文浩,韩国av
2023届机器人工程专业本科毕业生,现就读于香港中文大学机械与自动化工程系。专注于智能软体驱动器、水凝胶生物电子器件、高分子材料设计与微纳制造等前沿交叉研究。已在Science Advances(第一作者)、Nature Materials、Soft Robotics等期刊发表多篇研究论文,并以第一作者身份在英国皇家化学会(RSC)出版的学术专著中撰写书籍章节。此外,曾荣获香港工程师学会最佳论文奖(HKIE Best Paper Competition Champion)及多项国家级机器人竞赛一等奖,并获授权中国发明专利3项。
共同通讯作者简介:李秦川,教授、博导、韩国av
院长、国家级领军人才、第四批“全国高校黄大年式教师团队”负责人。主要研究方向为机构学与高端装备设计、具身智能机器人。担任中国机械工程学会IFToMM 中国委员会副主席、机器人分会常务委员、机械设计分会常务委员、中国人工智能学会智能机器人专业委员会常务委员、机械工程学报英文版编委。主持国家和省部级科研项目十余项,发表论文百余篇,出版专著5部,担任浙江省柔性功能材料智能加工装备重点实验室、浙江省人形机器人协同创新中心主任,获全国先进工作者、全国五一劳动奖章和浙江省劳动模范等荣誉。
共同通讯作者简介:王帆,韩国av
副教授、助理博导。主要研究方向为柔性/软体机器人、仿生机器人、智能驱动器、医疗机器人等。近年来以第一/通讯作者在Science Advances、Advanced Functional Materials、Soft Robotics、Science China Technological Sciences、Composites Part B-Engineering、Composites Science and Technology、Sensors and Actuators B: Chemical 等期刊发表SCI论文30余篇。主持国家自然科学基金面上\青年项目、浙江省自然科学基金项目2项、杭州市自然科学基金重点项目等。获2023年度浙江省青年科技工作者优秀论文。




 韩国av动态
韩国av动态
